Industrijska proizvodnja važna je karika u promicanju gospodarskog i društvenog razvoja. Trenutno se istraživanje automatske opreme za zavarivanje produbljuje i konkretizira, što je čini široko korištenom u proizvodnji različitih vrsta zavarenih konstrukcija.
U procesu automatskog zavarivanja, inteligentna i digitalna razumna kontrola pogreške zazora sklopa za zavarivanje do određene mjere, na temelju toga, također uzima u obzir razliku u položaju obratka, odstupanje spoja obratka i druge čimbenike. Stoga, tehnologija laserskog praćenja šava zavarivanja igra važnu ulogu u procesu zavarivanja.
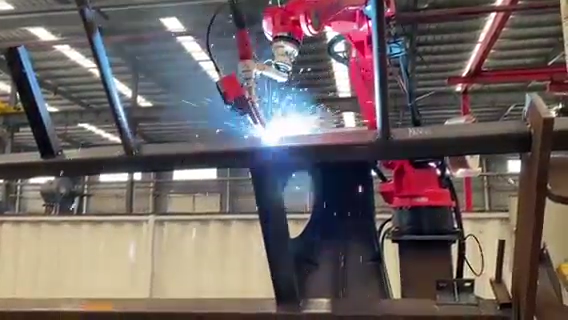
Zavarivanje podnožja vagona s cisternom za cement
-Položaj obratka uvelike varira
-Postoji odstupanje na spoju obratka
- Potrebna je visoka točnost zavarivanja
-Loše okruženje za zavarivanje i dim
U ovom slučaju, za zavarivanje se koristi Yooheart inteligentni robot HY1006A-145 s laserskim sustavom za praćenje šava zavara, koji ima visoku fleksibilnost, stabilnost i pouzdanost.
Prije svakog zavarivanja, oprema prvo skenira i bilježi koordinatu zavarenog šava putem lociranja zavarenog šava, a zatim izračunava pomak koordinata pomoću internog algoritma i stavlja referentne parametre koordinata u stvarno vrijeme kako bi ispravila stvarno odstupanje u vremenu, te tako osigurala brtvljenje i integritet proizvoda nakon zavarivanja.
Metoda "presjeka u četiri točke"
Kao što je svima poznato, dvije točke određuju ravnu liniju, ali sklop obratka će formirati kut, konvencionalni algoritam ne može odrediti njegov položaj, to zahtijeva korištenje metode "presjeka" na četiri sata, dva pravca koji se sijeku stvaraju točku presjeka, poseban algoritam izračunava položaj koordinate točke presjeka određivanjem poznatih koordinata četiriju točaka, kako bi se postigao cilj zavarivanja.

Sustav za lasersko praćenje šava
Sustav za praćenje laserskog zavarivanja uglavnom se sastoji od laserskih senzora i nadzornih terminala. Laserski senzor koristi se za aktivno prikupljanje i obradu informacija o zavarivačkom šavu u stvarnom vremenu te održava komunikaciju u stvarnom vremenu s industrijskim robotima. Nadzorni terminal prati i konfigurira senzore. Sustav također ima funkcije lociranja, praćenja i skeniranja prije zavarivanja kako bi se zadovoljile potrebe inteligentnog zavarivanja.
Princip rada: Skeniranje zavarenog šava, prilagođavanje slike oblaka točaka, algoritam točno identificira značajne točke, a podaci o rezultatima izračuna u stvarnom vremenu šalju se robotu u upravljačke upute, modificiraju ili vode rad robota.
Rješenje od valovite ploče

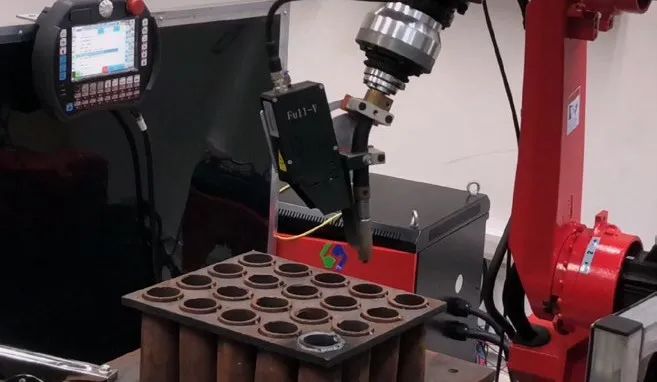
Rješenje za automatsko zavarivanje čepovima s okruglim otvorom

Rješenje kružnog šava

Rješenja za cijevne ploče
Yunhua Intelligent može pružiti brzo postavljanje, sigurna i učinkovita rješenja za automatizaciju i sistemska rješenja u stvarnom vremenu. Sustav za lasersko praćenje zavarenih šavova omogućuje robotu za zavarivanje lociranje i praćenje zavarenih šavova u stvarnom vremenu te ispravljanje putanje zavarivanja prema pomaku zavarenog šava u procesu zavarivanja, kako bi se ostvarilo pravo inteligentno zavarivanje.
Vrijeme objave: 09.04.2022.



